|
I am a Ph.D. student at the University of Texas at Austin, where I am advised by Prof. Amy Zhang. Pror to UT, I obtained my Master's degree at CMU, where I was advised by Prof. David Held. I obtained my undergraduate degree in CS and Applied Math at UC Berkeley, where I was fortunate to work with Prof. Pieter Abbeel and Prof. Aditya Grover. carlq@utexas.edu / CV / LinkedIn / Google Scholar |

|
|
|
|
I'm broadly interested in Reinforcement Learning, Computer Vision, and Robotics. My specific interests include object-centric learning, long-horizon reasoning, and generalization. My long-term research goal is to allow autonomous agents to act and learn in unstructured real world environments. |
|
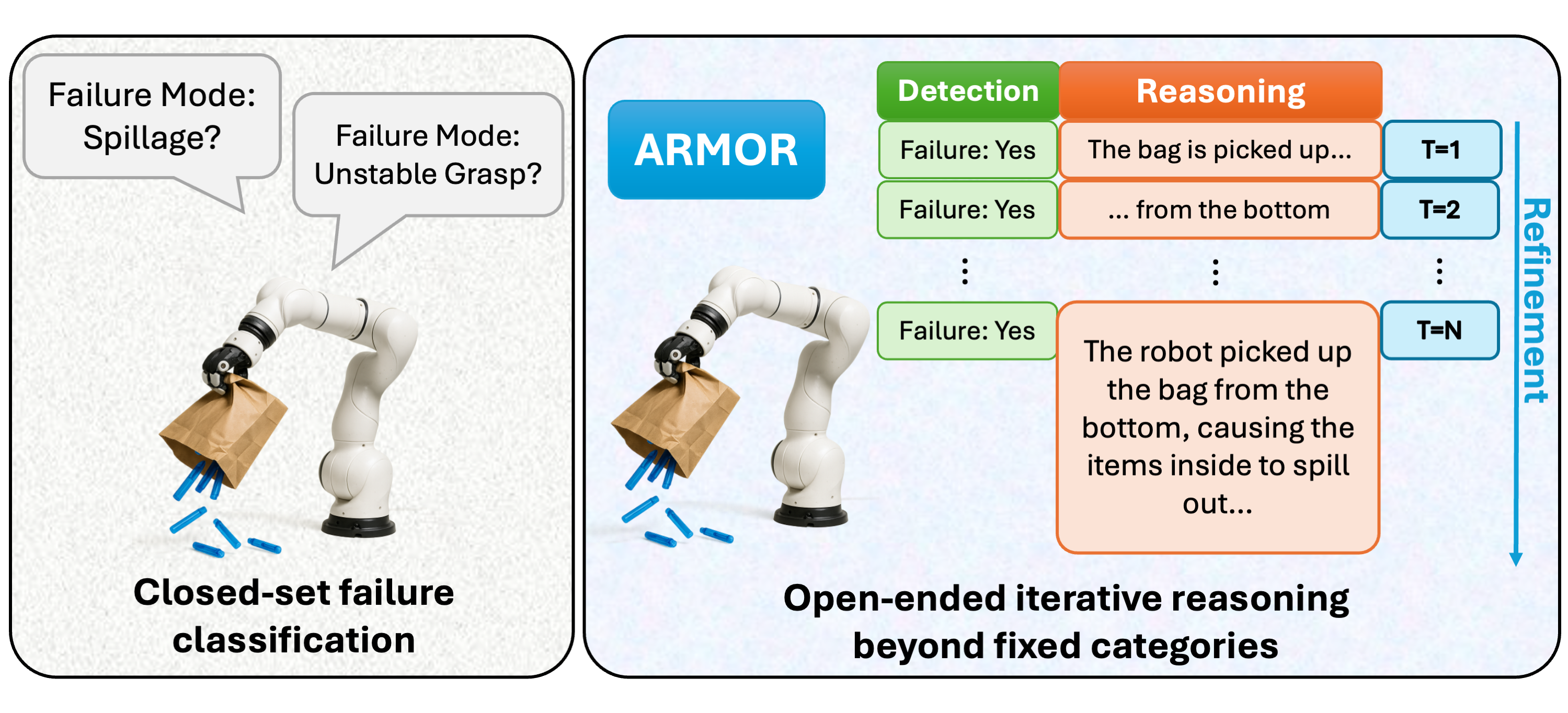
Carl Qi, Xiaojie Wang, Silong Yong, Stephen Sheng, Huitan Mao, Sriram Srinivasan, Manikantan Nambi, Amy Zhang, Yesh Dattatreya International Conference on Learning Representations (ICLR), 2026 Paper / Project Page |
|
Dan Haramati, Carl Qi, Tal Daniel, Amy Zhang, Aviv Tamar, George Konidaris International Conference on Learning Representations (ICLR), 2026 World Modeling Workshop (WMW), 2026 Oral Paper / Project Page |
|
Tal Daniel, Carl Qi, Dan Haramati, Amir Zadeh, Chuan Li, Aviv Tamar, Deepak Pathak, David Held International Conference on Learning Representations (ICLR), 2026 Oral (Top 1.18%) World Modeling Workshop (WMW), 2026 Oral Paper / Project Page |
|
Carl Qi, Dan Haramati, Tal Daniel, Aviv Tamar, Amy Zhang International Conference on Learning Representations (ICLR), 2025 Paper / Project Page / Code |
|
Caleb Chuck, Fan Feng, Carl Qi, Chang Shi, Siddhant Agarwal, Amy Zhang, Scott Niekum International Conference on Learning Representations (ICLR), 2025 Paper |
|
Caleb Chuck*, Carl Qi*, Michael Joseph Munje*, Shuozhe Li*, Max Rudolph*, Chang Shi*, Siddhant Agarwal*, Harshit Sikchi*, Abhinav Peri, Sarthak Dayal, Evan Kuo, Kavan Mehta, Anthony Wang, Peter Stone, Amy Zhang, Scott Niekum ICRA Workshop Manipulation Skills, 2024 Paper / Project Page / Code (coming soon) |
|
Carl Qi*, Yilin Wu*, Lifan Yu, Haoyue, Liu, Bowen Jiang, Xingyu Lin**, David Held** IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 Paper / Project Page / Code |
|
Xingyu Lin*, Carl Qi*, Yunchu Zhang, Zhiao Huang, Katerina Fragkiadaki, Yunzhu Li, Chuang Gan, David Held Conference on Robot Learning (CoRL), 2022 Paper / OpenReview / Project Page / Code |
|
Carl Qi, Xingyu Lin, David Held IEEE Robotics and Automation Letters (RA-L), 2022 Paper / Project Page / Code Covered by [The Washington Post] [CMU SCS News (robots roll dough)] |
|
Carl Qi, Pieter Abbeel, Aditya Grover Preprint, 2022 Paper |
|
|

